




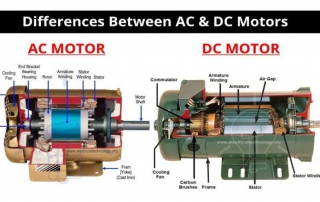
آشنایی با موتور الکتریکی و چگونگی عملکرد آن
اساس کار موتورهای الکتریکی معمولا الکترومغناطیس می باشد، با این حال موتورهای دیگری هم وجود دارند که بر اساس پیزوالکتریک و یا نیروی الکترواستاتیک کار می کنند و در موارد محدودی به کار می روند. دو جزء اصلی در موتورهای الکتریکی روتور و استاتور است که به قسمت ثابت موتور، [...]




